
{kind=link}
{kind=link}
The Power UMAC a motion computer with the latest hardware and software technology, providing the most high-performance, flexible machine controller in the world. The Power PMAC is a general-purpose embedded computer. It runs under a hard real-time Linux OS with a sophisticated motion and machine control application built in.
With the capability for a full operator interface, the Power PMAC eliminates the need for a separate PC. Users can also program in the easy-to-use Script language or the standard C language, leveraging its sophistication and flexibility.
Product benefits
Complete
flexibility
Full file
management system
Support for
large memory
Full 32/64-bit
architecture
Download the Power PMAC PDF for a detailed overview
Product features
Dynamic Multi-Block Lookahead
- Evaluates planned trajectory against motor limits
- Slows just enough to stay within position, velocity, acceleration limits
- Executes fastest possible traversal within machine constraints
Forward and Inverse Kinematics
- Simplifies programming for non- Cartesian mechanisms
- User routines convert between tool tip and actuator mechanisms
- Permits direct specification of tool tip path
S-curve Acceleration
- Automatically limits rate of change of acceleration (jerk)
- Specified by jerk magnitude or S-curve time
- Provides smooth profiles with reduced high-frequency content
Position Capture and Compare
- Specialised circuitry tying encoder counts to I/O
- I/O on exact count (w/sub-count interpolation) at any speed
- For probing, registration, measurement trigger, laser firing
Electronic Gearing and Cams
- Powerful master/slave techniques
- Position following (gearing) requires no program for motion
- External time base (cam) keeps full trajectory flexibility
Gantry Control with Skew Correction
- Multiple motors automatically slave commanded trajectory
- Automatic removal of power-on skew in homing search sequence
- Optional cross-coupling servo correction
Multiple Coordinate Systems
- Axes acting together should be in same Coordinate System
- Axes acting independently should be in separate Coordinate Systems
- Separate Coordinate Systems act as independent machines
Blended and Splined Moves
- Automatic on-the-fly transition for multiple programmed moves
- Controlled, specified, acceleration of transitions
- For single-axis profiles or multi-axis paths
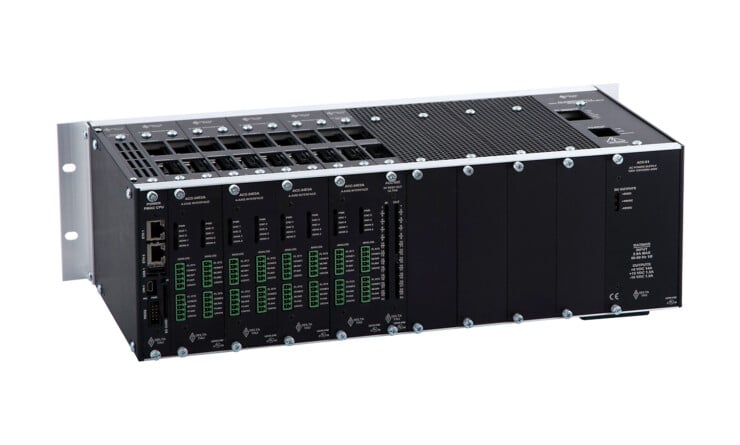
Delta Tau’s Open Architecture Platform provides complete flexibility to choose multiple types of motors, feedback devices, encoders and fieldbuses so you can create a system perfect for your application.
Additional axes, feedback, I/O and/or fieldbus interfacing is obtained by sliding accessory cards into the 3U rack system, available in 3 choices of rack widths (largest 21-slot version pictured below).

Up to 1.2 GHz Single/Dual Core
- Full real-time Operating System (Linux OS w/ real-time kernel)
- Full file management system (programs, data, files, etc.)
- Dedicated controller runs in the RT Linux environment
- Full 32/64-bit architecture
- Hardware 64-bit double precision floating point math
- Support for large memory
- 1GB or 2GB DDRAM active memory with error correction
- 64MB NOR flash for Kernel and Bootloader
- 512MB or 1/4/8 GB built-in NAND flash for user project (built-in)
- Interface for SD Card (SDHC, 32GB support
- Interface for USB 2.0 Devices (Hard drive, USB Stick, Keyboard, Mouse, etc.)
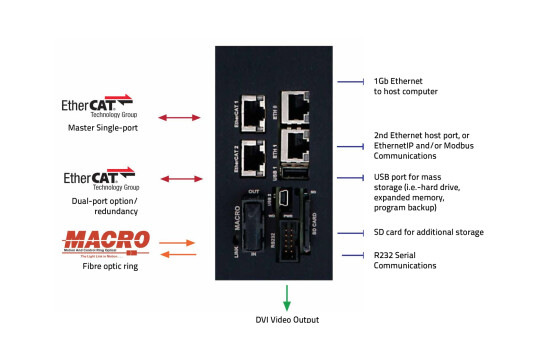
- 2 ethernet 1Gbps ports
- Built in USB2.0 Interface
- Optional 4x PCI Express (PCIe) port
- Optional Direct Video Interface (DVI Output)
- DVI output, 2 extra USB ports
Multiple Types of Communication Simultaneously